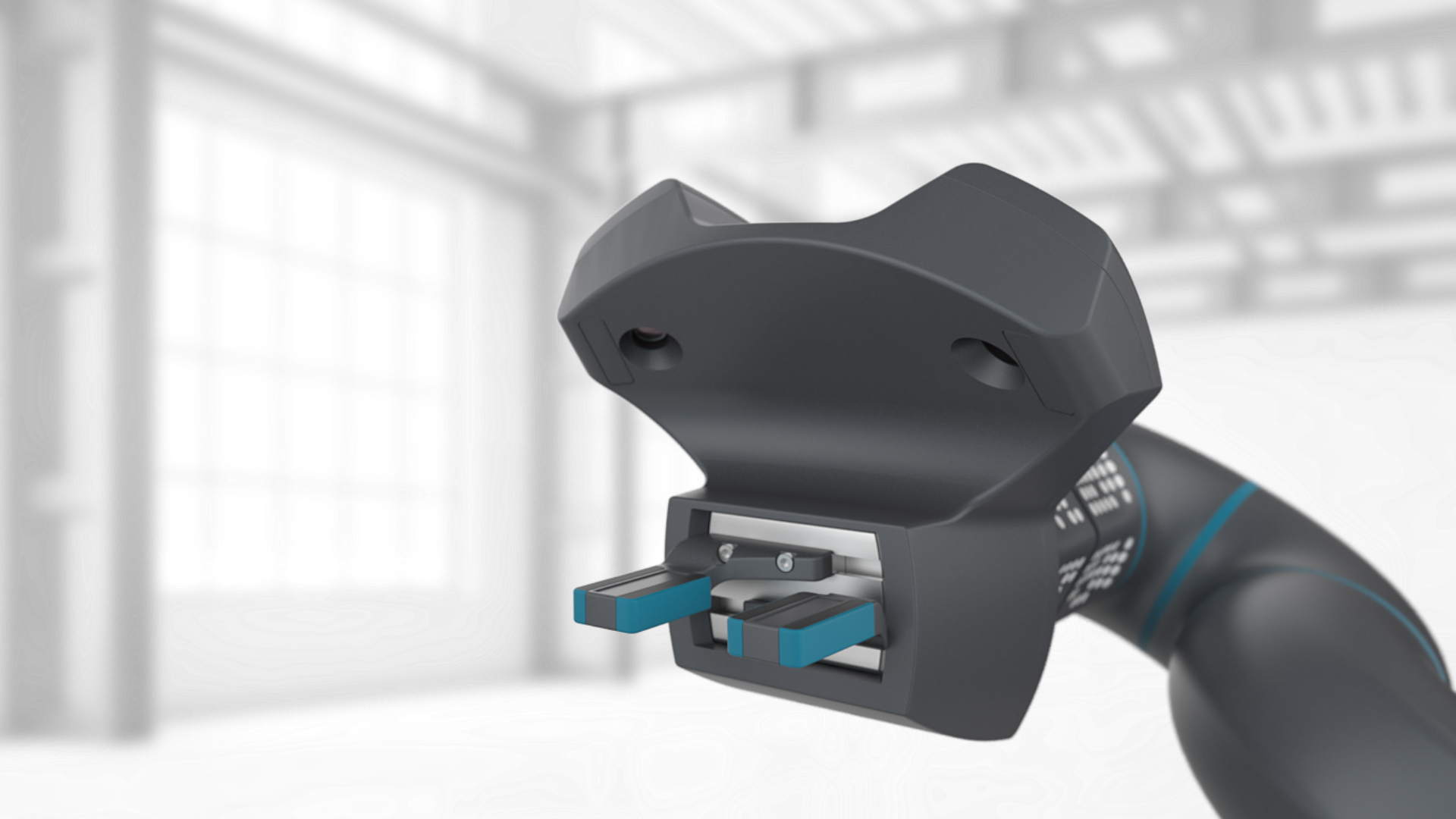
Camera-based tactile sensor
Tactile sensors provide a pressure or contact profile, similar to touch we feel on our skin. They offer rich feedback about the grasping process and are thus essential for adaptive and sensitive grasping processes. Our camera-based solution requires only a passive and deformable material, which deforms on pressure. Our image processing software derives a tactile signal from the observed deformation.
Interactive demo: Drag the objects to the finger to see the tactile profile

Pressure [MPa]
Tactile Pressure Profile
Benefits
How does our solution help you?




Development kit
Our kit contains everything you need to get started quickly with tactile sensing. Contact us for options and availablity.
- Sensitive element (rubber foam bar), with mounts for common grippers
- USB3 camera
- Sensor software with ROS integration
- Bootable USB stick
- Web-based interface
Technical data
| Application | Gripper finger, eye-in-hand camera | High-end camera |
|---|---|---|
| Deformable element | EPDM (Rubber foam) | |
| Sensor length * | 20 to 150 mm typ. | |
| Data points | 1x20 to 1x150 (1 point/mm length) | |
| Maximum pressure * | 100 kPa – 1 MPa | |
| Trigger level | 5% typ. | |
| Noise level | 2% typ. | |
| Sampling rate | 60-120 Hz (camera framerate) | |
| Software | Sensor software running on ROS/Linux | |
| Camera | USB3 Vison, Standard USB UVC, etc. |
*: Adjustable values
Values are given for a typical camera setup: Full HD camera, 30 cm distance.