Kamerabasierte Sensoren
Technologie

Visevi Robotics bietet das weltweit erste vollständig kamerabasierte Sensorsystem für Roboterarme und Greifer. Unsere patentierte Lösung basiert auf einer Bildverarbeitungssoftware und bietet umfangreiches Sensor-Feedback.

Wir ersetzen elektronische Sensoren für Gelenkwinkel, Kraft/Drehmoment und taktile Daten durch kostengünstige passive Elemente. Positionen und Winkel werden mit visuellen Markern bestimmt, die Krafterfassung nutzt verformbare Elemente wie z.B. Schaumgummi. Eine Kamera beobachtet diese Elemente. Die physikalischen Maße werden von unserer Software aus dem Bild berechnet.

Die Sensor-Software von Visevi vereinfacht Mechanik, Elektronik und Verkabelung von Roboterarmen erheblich - und ermöglicht so deren Einsatz in der Low-Cost-Automatisierung, der Servicerobotik und in Consumer-Anwendungen. Der Roboter wird kontinuierlich automatisch kalibriert, was den Einsatz von kostengünstigen Komponenten auch für präzise Manipulationsaufgaben ermöglicht.
Funktionsprinzip




Gelenkwinkel-Sensor
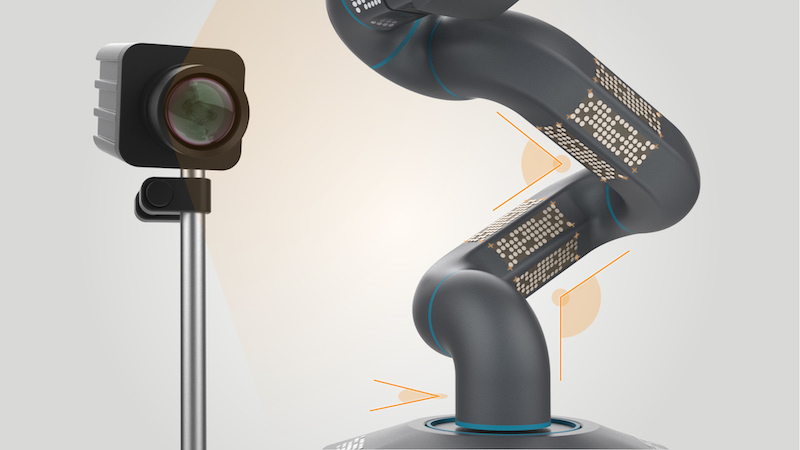
Winkelsensoren oder Encoder in den Gelenken sind für Roboterarme unverzichtbar. Unsere Technologie ermittelt die Gelenkzustände nur mit einer externen Kamera und einer Bildverarbeitungssoftware. Die Software lokalisiert präzise die Marker auf dem Roboterarm, im Bild grün dargestellt, und berechnet aus diesen visuellen Messungen die Gelenkwinkel.
Product: ViseJoint Winkelsensor

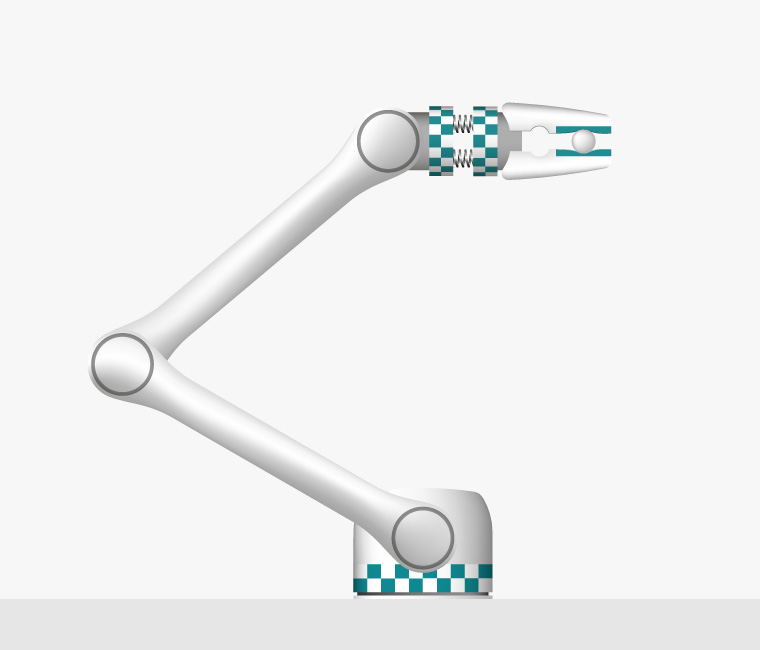
Kraft-/Drehmoment-Sensor
Diese Sensoren messen 3D-Kraft und 3D-Drehmoment, in der Regel zwischen dem Roboterarm und dem Werkzeug. Sie ermöglichen z.B. Kraftregelung und Einlernen von Bewegungen. Unsere Lösung basiert auf einer einfachen passiven Feder-Struktur, die sich bei Krafteinwirkung frei verbiegt. Diese Biegung wird von der Kamera beobachtet und von unserer Bildverarbeitungssoftware in ein Kraft-/Drehmomentsignal umgewandelt.

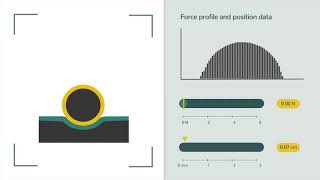
Taktiler Sensor
Taktile Sensoren liefern ein Druck- oder Berührungsprofil, ähnlich der Berührung, die wir auf unserer Haut spüren. Sie bieten umfangreiches Feedback über den Greifvorgang und sind somit essentiell für adaptive und sensible Greifvorgänge. Die kamerabasierte Lösung von Visevi nutzt lediglich einen passiven und kostengünstigen Schaumstoffstreifen an den Fingern, der sich bei Druck verformt. Unsere Bildverarbeitungssoftware leitet aus der beobachteten Verformung ein taktiles Signal ab.
Product: ViseTac taktiler Sensor
Klicken Sie auf die Tropfen im Bild für Details zum jeweiligen Sensor
Taktiler Sensor - interaktive Demo

Taktiles Druckprofil
Ziehen Sie die Objekte auf den Finger, um das taktile Profil zu sehen