Details Vermeidet komplexe, unflexible und teure Zuführsysteme. Die Software arbeitet mit der preisgünstigen RealSense-Kamera.

Details Überwacht den Greifvorgang, um ein genaues, schnelles und sicheres Greifen zu gewährleisten.

Details Ermöglicht ein einfaches Plug&Play-Setup durch eine enge Integration von Kamera, Software und Greifer mit standardisierten ROS-Schnittstellen.

Details Erkennt und erfasst eine Vielzahl von Objekten mit Deep-Learning-Technologie. Objektmodelle oder Vortraining sind nicht erforderlich!
Kontaktieren Sie uns für weitere Informationen oder für eine kostenlose Analyse Ihres Anwendungsfalls!
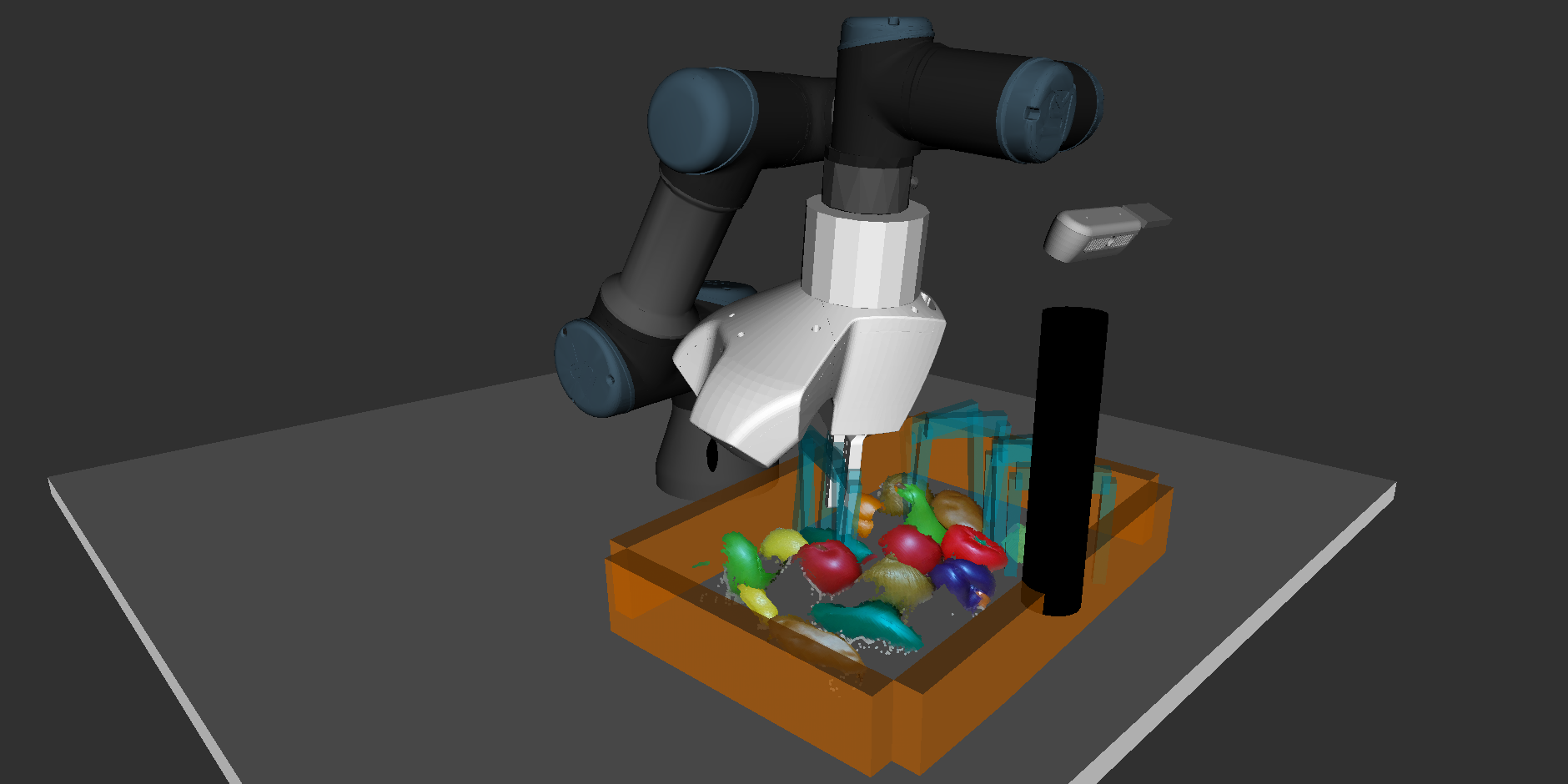
KontaktUnsere Bin Picking Lösung ist in verschiedenen Paketen erhältlich, von der reinen Software bis hin zu einer vollständig integrierten Lösung, inklusive Service und Hardware wie Roboterarm, Greifer und Kamera. Wählen Sie je nach Bedarf die folgenden Module aus:
Software zum Bin Picking
Schnittstelle & Web UI
Taktiles sensitives Greifen
Intelligenter Greifer & Kamera
Roboterarm
Systementwurf & Integration
Deep Learning
| Komponente | Merkmale |
|---|---|
| Kamera |
|
| Kompatible Roboterarme | UR, Kawasaki, Stäubli, jeder ROS-fähige Arm |
| Endeffektor |
|
| Sensorik und Feedback | Kamerabasierte taktile Sensorik ViseTac für:
|
| Geeignete Objekte |
|
| Greifalgorithmus | Modellfreie KI-basierte Greifpunkterkennung und -scoring. Greift unbekannte Objekte, kein Training/Objektmodell erforderlich. |
| Schnittstellen |
|
| Erkennungszeit | Typ. 1s Erkennung, sofortiges Scanning |
| Prozessor | Standard-PC, mid-range/high-end i7 empfohlen. Installation auf vorhandenem PC möglich. |