Kamerabasierter taktiler Sensor


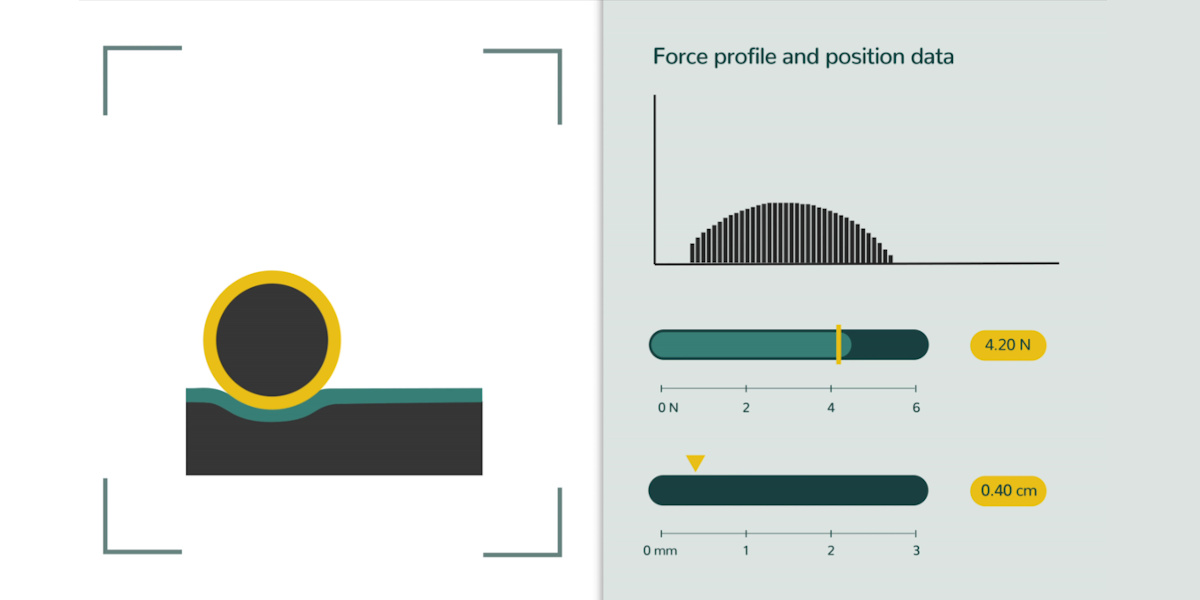
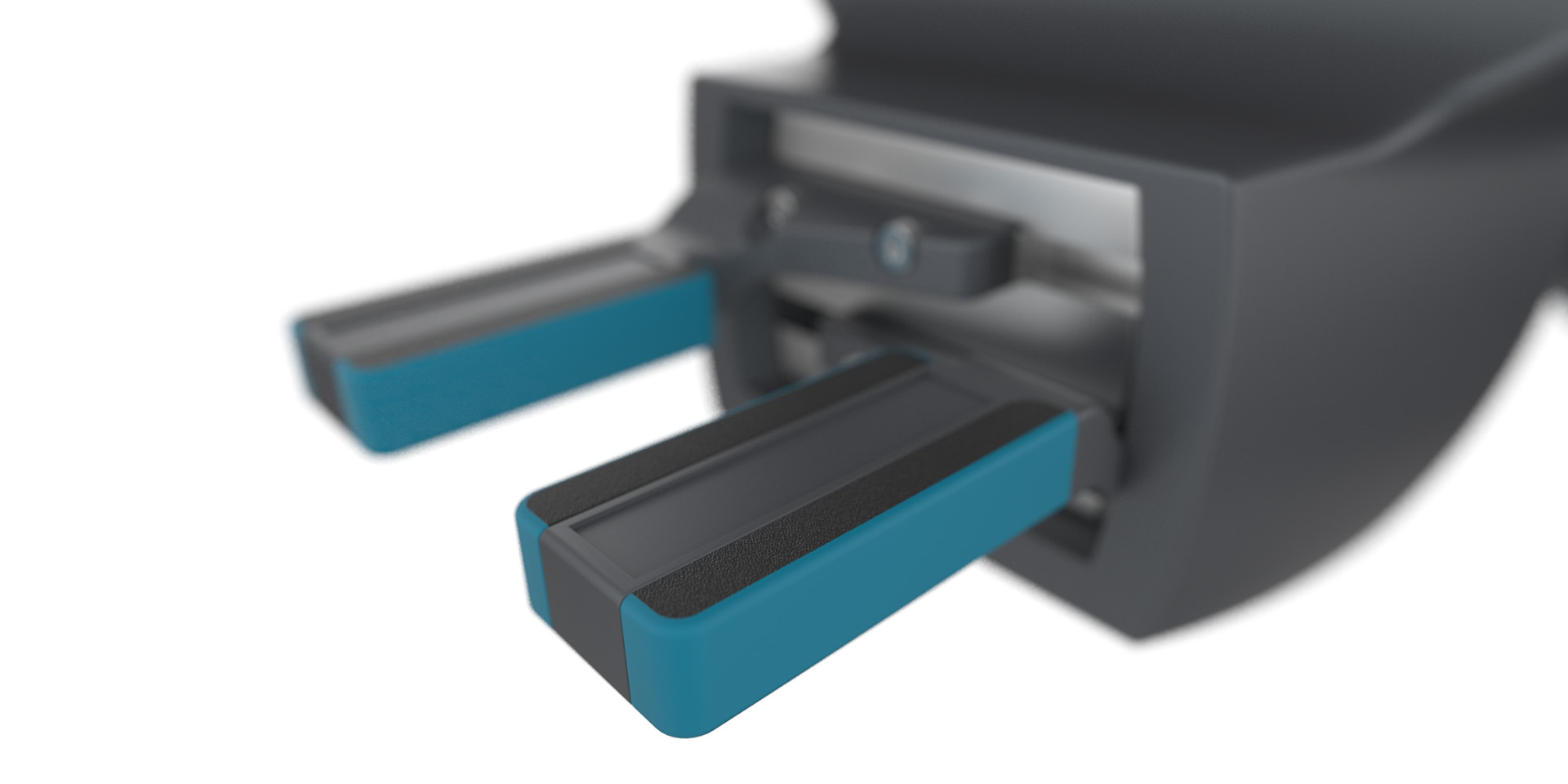
Taktile Sensoren liefern ein Druck- oder Berührungsprofil, ähnlich der Berührung, die wir auf unserer Haut spüren. Sie bieten ein reichhaltiges Feedback über den Greifvorgang und sind somit essentiell für adaptive und sensible Greifvorgänge. Unsere kamerabasierte Lösung benötigt nur ein passives und verformbares Material, das sich auf Druck verformt. Unsere Bildverarbeitungssoftware leitet aus der beobachteten Verformung ein taktiles Signal ab.
Die kamerabasierte Sensortechnologie ist patentiert und wurde an der Technischen Universität München (TUM) entwickelt.