Software zur flexiblen, kamerabasierten Greif-/Pickplanung mit taktiler Sensorik. Funktioniert für beliebige Objekt (ohne Modell) mit low-cost Kameras.

Greifsystem für vielseitige und feinfühlige Handhabung mit integrierten Kameras und kamerabasierter taktiler Sensorik in den Fingern.

Pick-and-Place-Lösung mit Stereo-Tiefenkamerasystem zur sicheren Handhabung von Objekten aus variablen Positionen.

Fühlen durch Sehen! Unsere kamerabasierte Lösung liefert taktile Daten per Bildverarbeitung und benötigt nur ein passives sensitives Element.
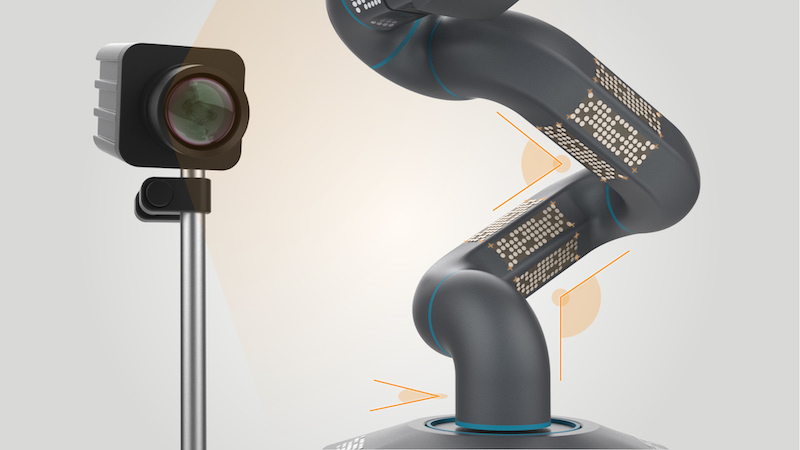
Virtueller Sensor basierend auf Computer Vision zur Messung der Winkelstellungen aller Gelenke eines Roboterarms (Encoder). Steuert sensorlose Roboter nur mit einer externen Kamera.

Unsere Vision ist es, intelligente Roboter für jeden verfügbar zu machen – um uns in der Fertigung, im Büro und zu Hause zu helfen. Sensorik ist eine Schlüsseltechnologie, um Roboter "aus dem Käfig" herauszuholen, aber aktuelle Sensorsysteme sind komplex und teuer.
Visevi Robotics bietet das weltweit erste vollständig kamerabasierte Sensorsystem für Roboterarme und Greifer. Unsere patentierte Lösung basiert auf einer Bildverarbeitungssoftware und bietet umfangreiches Sensor-Feedback.
Learn more
Echtzeit-Winkelmessung (bis zu 7 Axen) mit Kameras über eine Computer Vision Software. Sensorlose Bewegungssteuerung für intelligente Roboterarme auf Servicerobotern, in mobilen Anwendungen sowie im Heimbereich.

Intelligente Bin Picking Software mit KI-basierter Greifplanung für empfindliche und weiche Objekte. Demo für Keba, mit ROS und ViseGrip Greifer.

Konzept für einen Saugroboter der nächsten Generation: Die mobile Plattform verfügt über einen sensorlosen Roboterarm, der ausschließlich von Kameras gesteuert wird, die Gelenkpositionen aus visuellen Markierungen am Arm berechnen.

ViseGrip in einer mit Gimatic entwickelten Pick-and-Place-Anwendung: Verschiedene Objekte aus Glas und Kunststoff werden aus der weißen Halterung entnommen, mittels kamerabasierter Tastsensorik erkannt und sortiert

Ein 6D-Kraft-Momenten-Sensor mit einem einzigartigen Prinzip: Kräfte und Drehmomente werden über eine externe Kamera mittels patentierter Computer-Vision-Technologie gemessen.
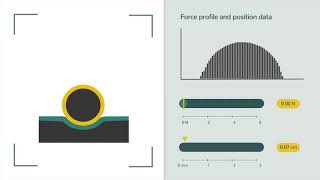
Taktile Sensoren liefern ein Druck- oder Kontaktprofil, ähnlich wie unser taktiler Sinn. Die kamerabasierte Sensortechnologie bietet einen virtuellen taktilen Sensor, der taktile Signale aus einem Kamerabild ableitet – ganz ohne Sensor am Roboter!