Unsere technische Lösung
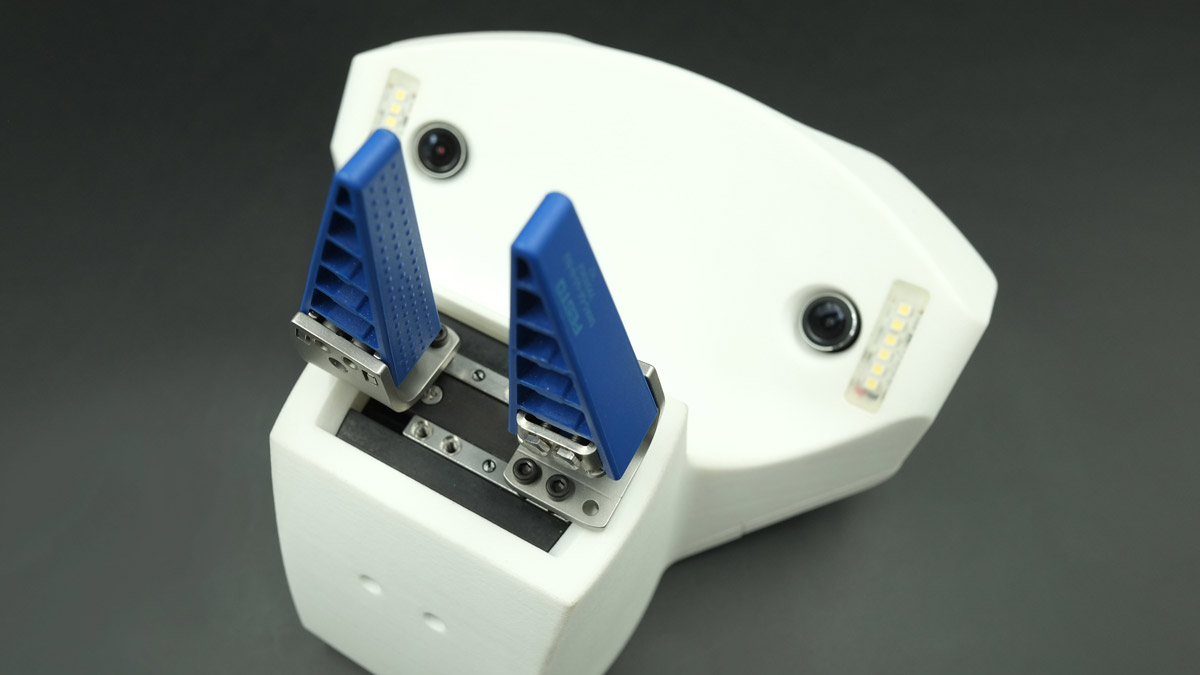
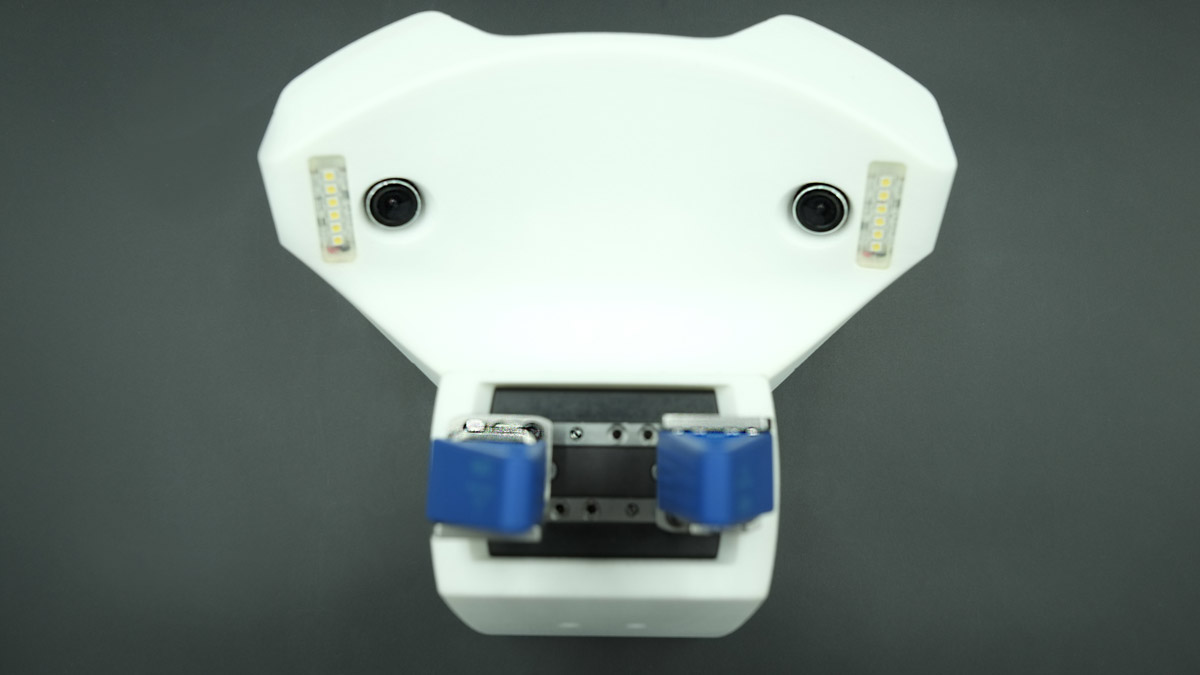
Unsere intelligente Greiflösung integriert zwei Graustufen-/Farbkameras, einen industriellen 2-Backen-Greifer sowie Universalfinger in einem kompakten Gehäuse mit Standardhalterung. Die Finger sind mit einer Schicht aus Schaumgummi ausgestattet, um die kamerabasierte taktile Sensorik.
Das Herzstück unserer Sensortechnologie ist eine Bildverarbeitungssoftware, die physikalische Sensorsignale aus der Beobachtung der Verformung des Schaumgummis beim Kontakt ableitet. Somit wird die Sensorfunktionalität von komplexen und dedizierten Hardwaremodulen in unsere intelligente Sensorsoftware verlagert. Diese Sensorsoftware liefert reichhaltiges Feedback über den Greifprozess, einschließlich Tast-/Druckprofil, Greifkraft, Greiferöffnung, Objektposition/-anzahl, Objektform, Objektverformung und detaillierte Greifstatistiken. Anhand dieser Daten ermöglicht unser Multi-Goal-Greifer-Controller ein intelligentes und flexibles Greifen von unterschiedlichen Objekten.
Unser patentiertes Sensorprinzip ermöglicht es Ihnen, die Finger des Greifers einfach auszutauschen oder anzupassen. Das liegt daran, dass keine Verdrahtung in den Fingern notwendig ist, da der Schaumgummi komplett passiv und ohne integrierte Elektronik ist.
Gleichzeitig können die Kameras für verschiedene andere Aufgaben wie z.B. Objekterkennung und Lokalisierung eingesetzt werden. Bitte setzen Sie sich mit uns in Verbindung, um Ihre Anforderungen an die Computer Vision zu besprechen.