Camera-based tactile sensor
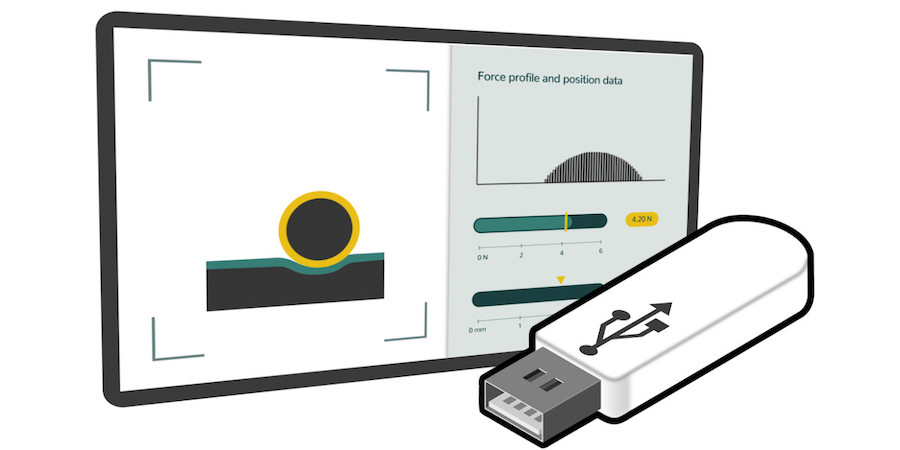
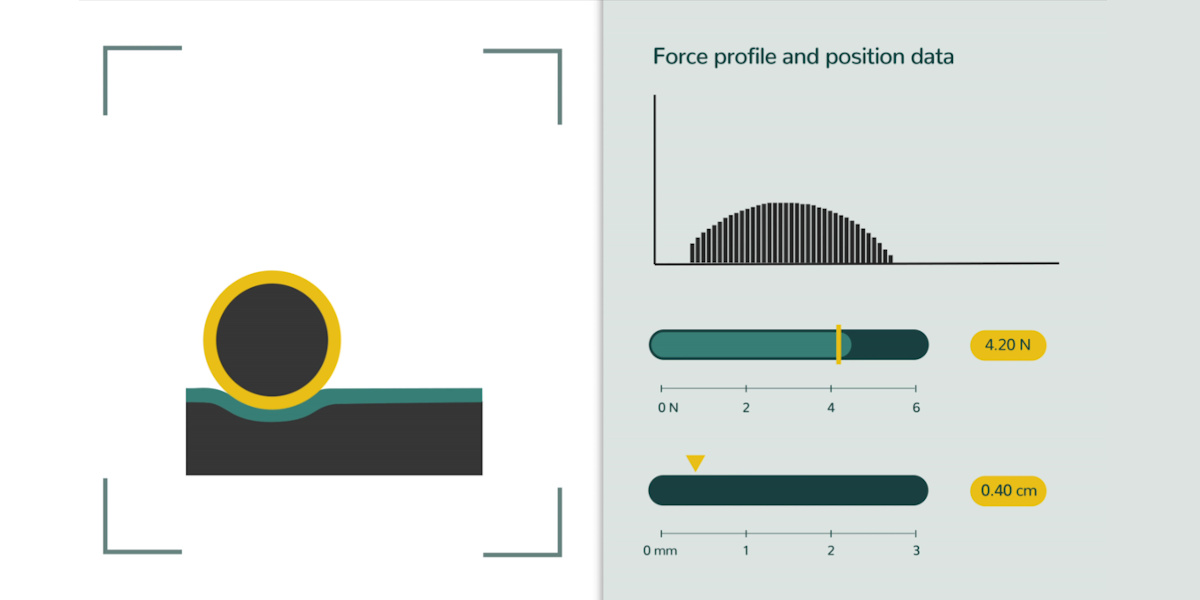
Tactile sensors provide a pressure or contact profile, similar to touch we feel on our skin. They offer rich feedback about the grasping process and are thus essential for adaptive and sensitive grasping processes. Our camera-based solution requires only a passive and deformable material, which deforms on pressure. Our image processing software derives a tactile signal from the observed deformation.
Camera-based sensing technology is patented and was developed at Technical University of Munich (TUM).
Explainer video: Camera-based tactile sensing

Development kit now available
Our dev kit contains fingers with foam bars, a camera (optional) and the sensor software, bootable from a USB stick. Order now and get started with camera-based tactile sensing within minutes!
Sensitive grasping
Tactile sensing enables delicate and flexible handling with rich feedback. The ViseGrip gripper integrates cameras and camera-based tactile sensors.

Passive gripper fingers
Soft fingers for camera-based sensing can be attached to any gripper. There are no electronics in the fingers – no wiring required!.

Different shapes and sizes
Since the sensing element is passive and deformable, it can be adapted to any shape and size.