Software for camera-based flexible grasp/pick planning with tactile sensing. Works for any object (without model) and with low-cost cameras.

Gripping system for versatile and sensitive handling with integrated cameras and camera-based tactile sensors in the fingers.

Pick and place solution based on a stereo depth camera system to enable the reliable handling of objects from unstructured positions.

Feeling by seeing! Our camera-based solution relies on a passive sensitive element and provides tactile data from image processing.
Virtual sensor based on computer vision that measures angular positions of all joints (encoder) of a robot arm. Controls sensorless robot using only an external camera.

Our vision is to make intelligent robots available to everyone – to help us in manufacturing, in the office and at home. Sensors are a key technology to bring robots “out of the cage”, but current sensor systems are complex and expensive.
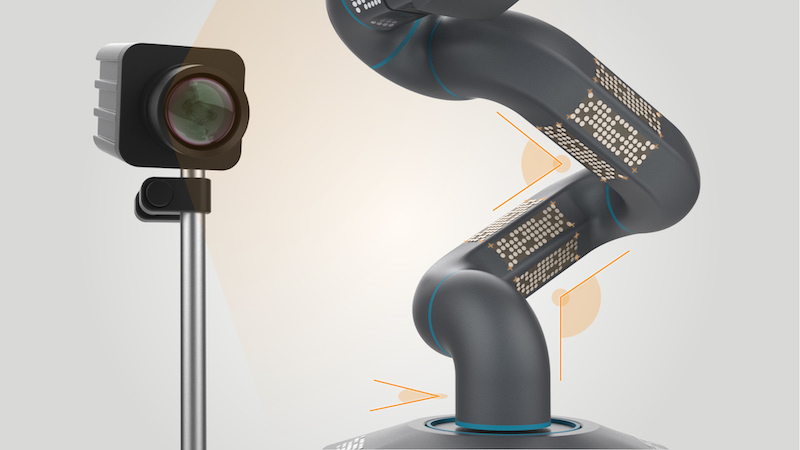
Visevi Robotics offers the world's first completely camera-based sensor system for robot arms and grippers. Our patented solution relies on an image processing software and features rich sensory feedback.
Learn more
Realtime angle measurement (up to 7 dof) using cameras and computer vision software. Sensorless motion control for smart robot arms on service robots and in mobile or home applications.

Intelligent bin picking software with AI-based grasp planning for sensitive and soft objects. Demo with Keba, using ROS and ViseGrip.

A concept for a next generation vacuum robot: The mobile platform features a sensorless robot arm solely controlled by cameras, which obtain joint positions from visual markers on the arm.

ViseGrip in a pick-and-place application developed together with Gimatic: Various objects made of glass and plastic are picked from the white holder, detected an dsorted based on camera-based tactile sensing

A 6D force-torque sensor with a unique principle: Forces and torques are measured by an external camera, using patented computer vision technology.
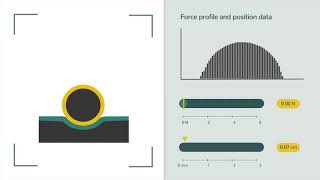
Tactile sensors provide a pressure or contact profile, similar to our skin. Our camera-based sensor technology provides a virtual tactile sensor, deriving tactile signals from a camera image – without a sesnor on the robot!