Camera-based sensors
Technology Overview

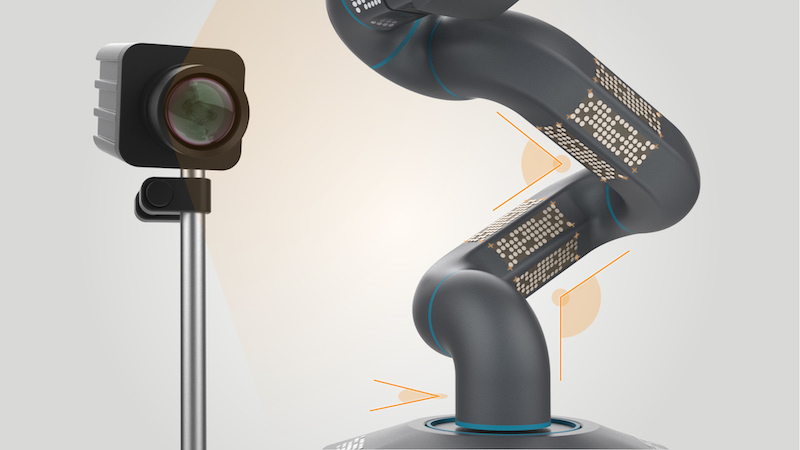
Visevi Robotics offers the world's first completely camera-based sensor system for robot arms and grippers. Our patented solution relies on an image processing software and features rich sensory feedback.

Low-cost passive elements substitute electronic sensors for joint positions, force/torque and tactile data. Positions are determined using visual markers, while force sensing relies on deformable elements, such as rubber foam. A camera observes these elements remotely. The physical measurements are calculated from the image by our software.

Visevi’s sensor software greatly simplifies the mechanics, hardware design and wiring of robot arms – and thus enables their use in low-cost automation, service robotics and consumer applications. The robot is continuously auto-calibrated, enabling the use of low-cost structural parts even for precise manipulation tasks.
How does it work?
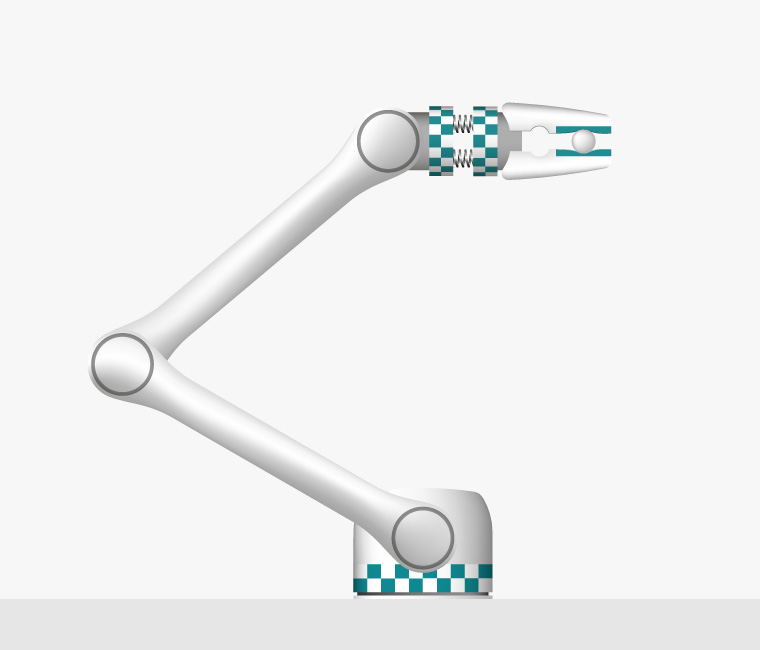




Joint angle encoder
Joint position sensors or encoders are indispensable for any robot arm. Our technology determines the joint states remotely, using only a camera and an image processing software. The software accurately localizes patterns on the robot arm, indicated in green in the picture, and calculates the joint positions from these visual measurements.
Product: ViseJoint angle encoders

Force/torque sensor
These sensors measure 3D force and 3D torque, usually between the robot arm and the tool. They allow for force control and teaching of motions. Our solution relies on a very simple passive, elastic structure, which bends when forces are applied. This bending is observed by the camera and converted to a force/torque signal by our image processing software.

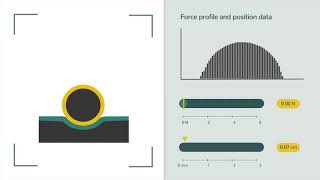
Tactile sensor
Tactile sensors provide a pressure or contact profile, similar to touch we feel on our skin. They offer rich feedback about the grasping process and are thus essential for adaptive and sensitive grasping processes. Visevi's camera-based solution requires only a passive and low-cost foam bar on the fingers, which deforms on pressure. Our image processing software derives a tactile signal from the observed deformation.
Product: ViseTac tactile sensor
Click on the drops in the picture to see how our sensors work on a robot arm
Tactile sensor – interactive demo

Tactile Pressure Profile
Drag the objects to the finger to see the tactile profile