Our technical solution
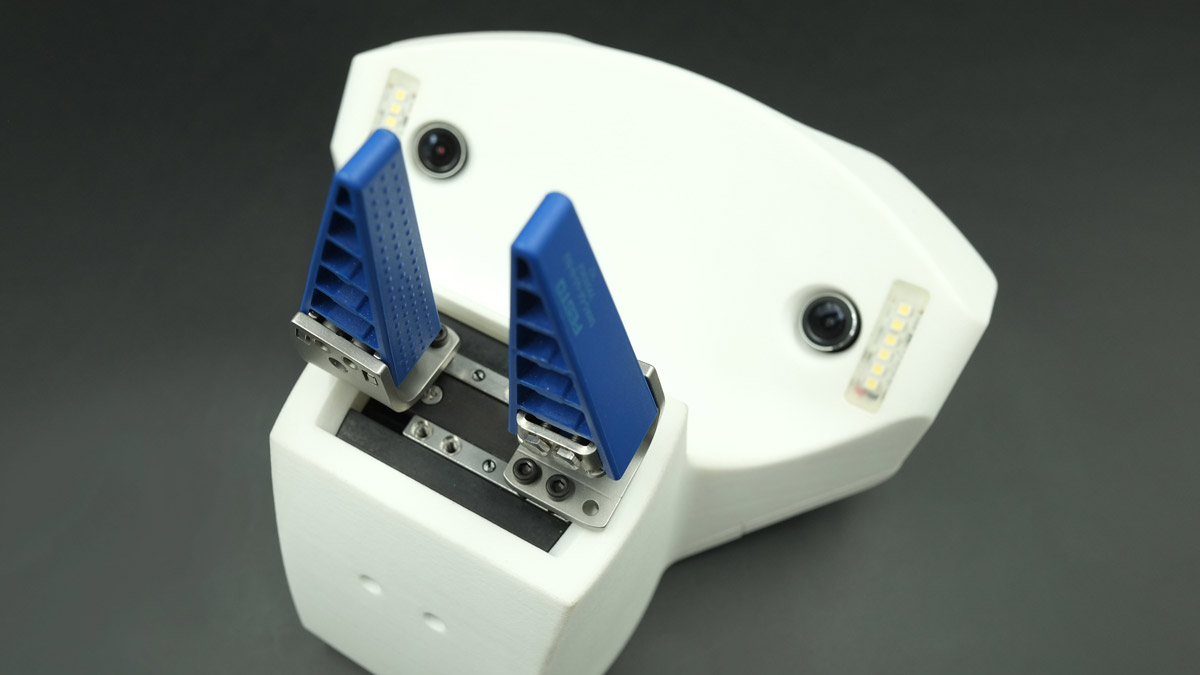
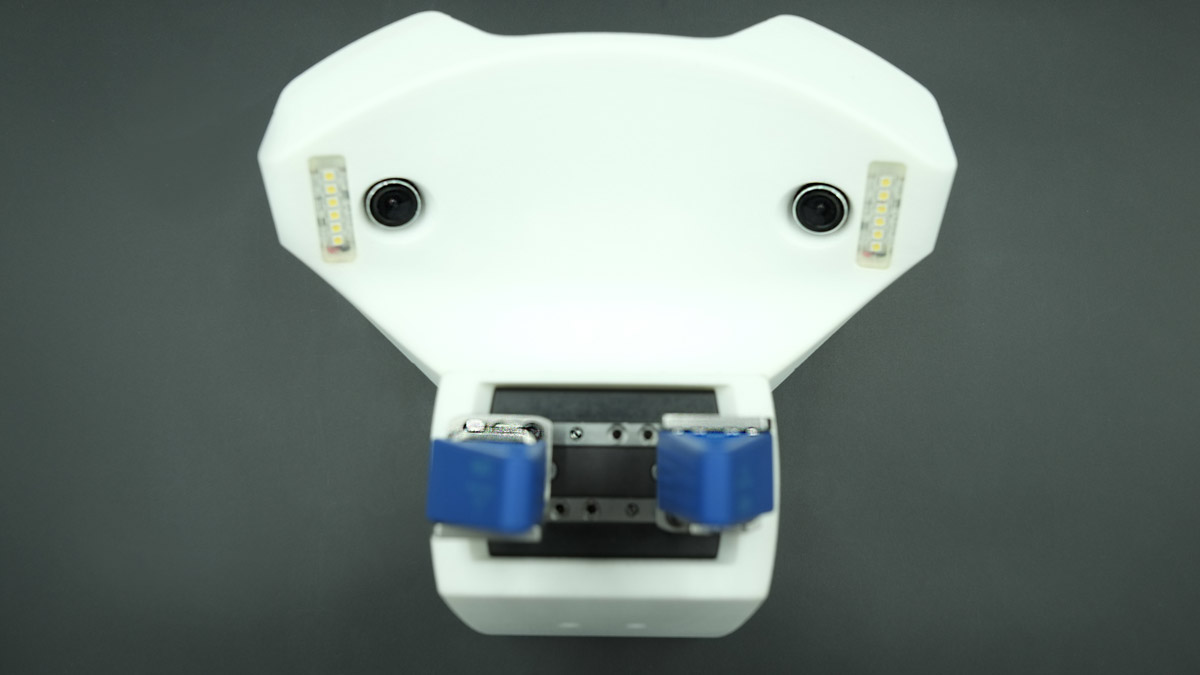
Our intelligent gripping solution integrates two grayscale/color cameras, an industrial 2-jaw gripper, as well as universal fingers in a compact package with a standard mount.
The fingers are equipped with a layer of rubber foam to support camera-based tactile sensing.
The core of our sensing technology is an image processing software, which derives physical sensor signals from the observation of the rubber foam's deformation during contact.
Hence, the sensor functionality is shifted from complex and dedicated hardware modules into our intelligent sensor software.
This sensor software provides rich feedback about the grasping process, including tactile/pressure profile, grasping force, gripper opening, object position/count, object shape, object deformation and detailed grasping statistics.
Using this data, our multi-goal grasp controller enables intelligent and flexible grasping of varying objects.
Our patented sensor principle allows you to simply replace or adapt the gripper's fingers. This is due to the fact that no wiring is needed in the fingers, since the rubber foam is completely passive and without any integrated electronics.
At the same time, the cameras can be used for various other tasks like for example object recognition and localization. Please get in contact with us to discuss your computer vision requirements.